Specifications:Model: UGV Rover ROS2
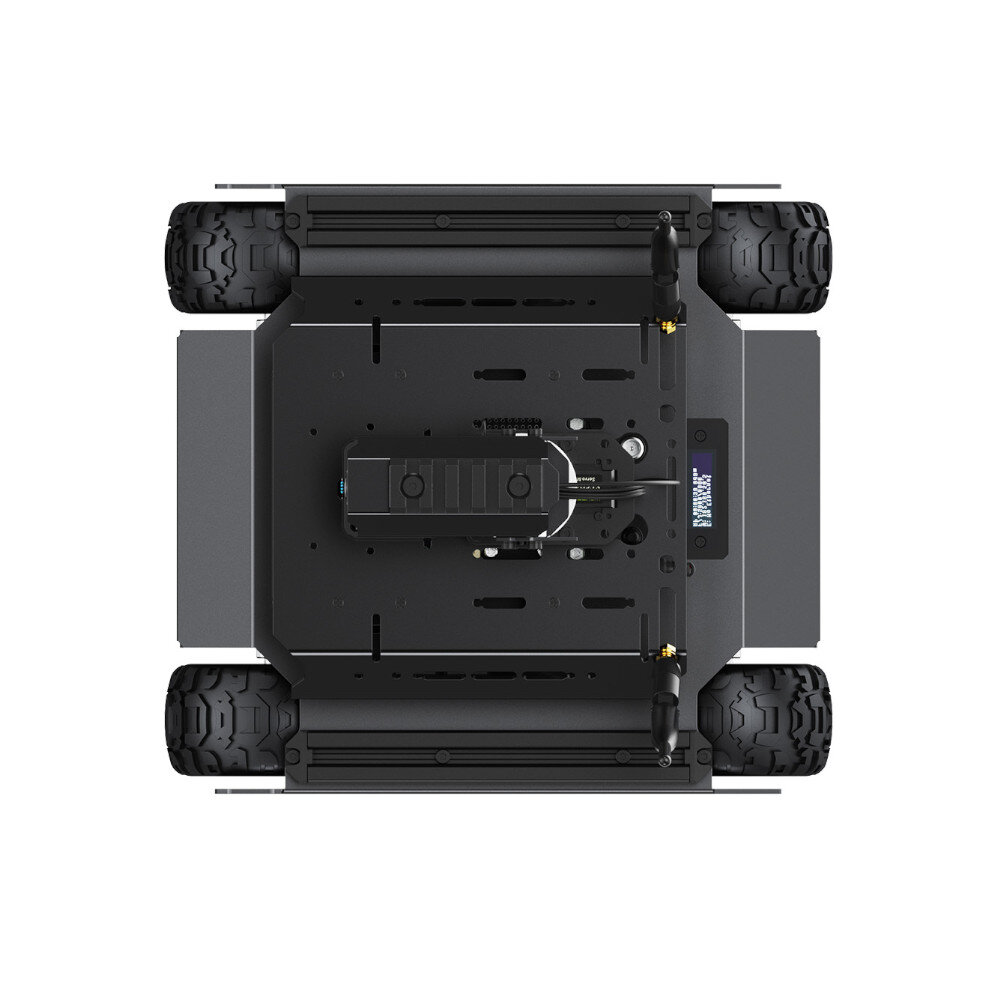
Wheel Configuration: 6 Wheels, 4 Wheel Drive (4WD)
Compatibility: Designed for Jetson Orin Series Board
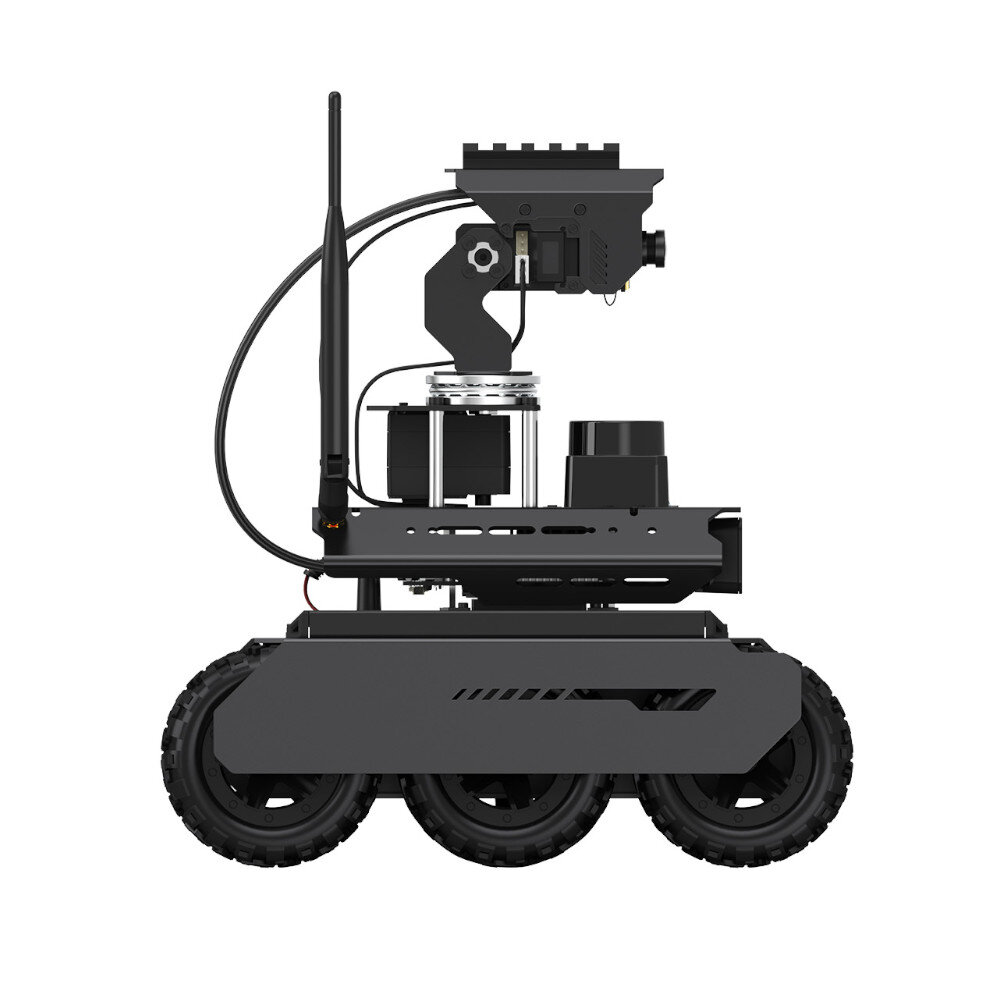
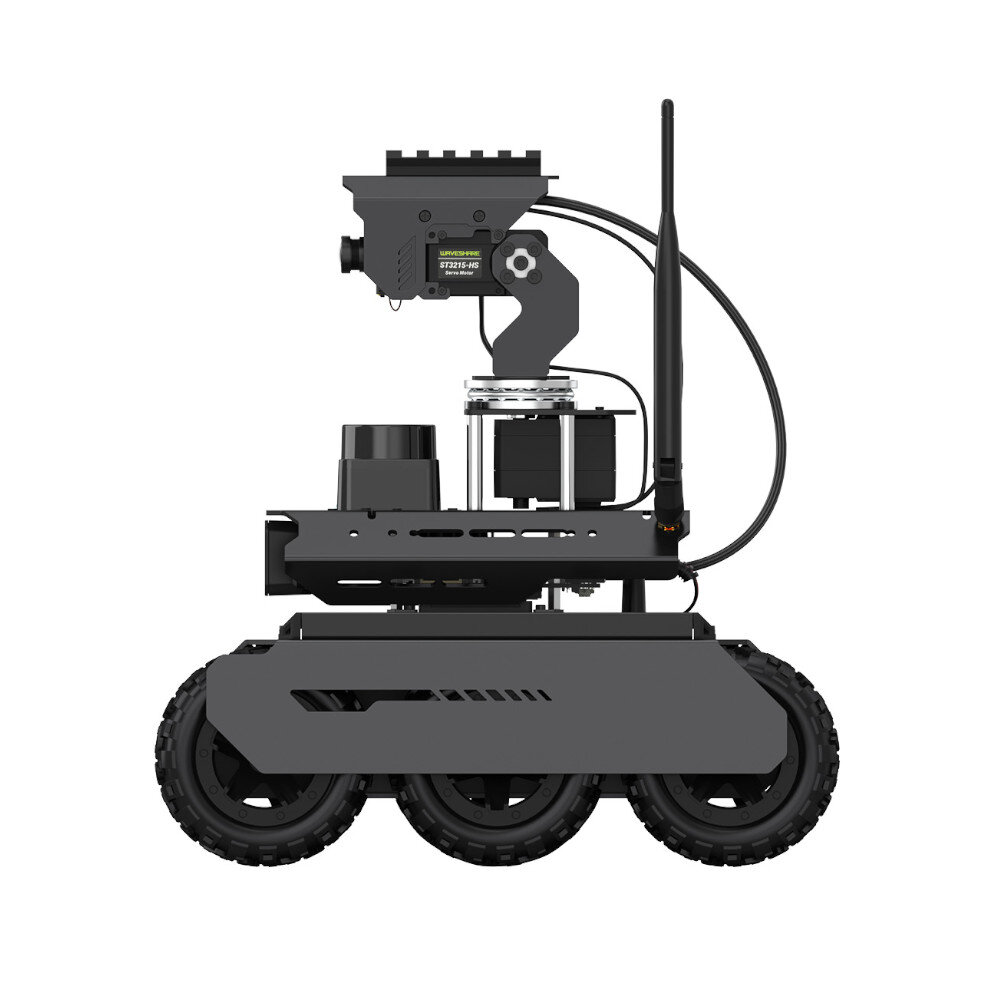
Gimbal: 360u00b0 Flexible Dual-axis Gimbal
Controllers: Dual Controllers
Dimension: 253*231*289mm
Chassis Height: 25mm
Pan-Tilt DOF: 2
Pan-Tilt Servo Torque: 30KG.CM
Pan-Tilt SERVO: ST3215 Servo
Host Controller: Jetson Orin Nano 4GB Kit(Only Motherboard Type have)
Host System Support: ubuntu 22.04
ROS2 Version: ROS2-HUMBLE-LTS
Camera FOV: 160u00b0
Power Supply: 3S UPS Module
Battery Support: 18650 lithium battery x 3 (not Included)
Demo Control Methods: Web application / Jupyter Lab interactive programming
Default Max Speed: 1.3m/s
Number of Driving wheels: 4
Tire Diamter: 80mm
Tire Width: 42.5mm
Minimum Turning radiius: 0M(In-situ rotation)
Features:1. ROS2 Open-source System: Supports a variety of programming languages and development environments.
2. 360u00b0 Flexible Dual-axis Gimbal: Provides smooth and stable footage, ideal for high-precision applications.
3. Jetson Orin Compatibility: Highly compatible with advanced AI applications and machine learning tasks.
4. Dual Controllers: Includes both PC controller and remote for versatile operation options.
5. Multiple Auto Navigation Modes: Enables autonomous navigation with SLAM, GPS, and visual positioning capabilities.
Package Include:1x UGV Rover ROS2 Robot
1x Jetson Orin Motherboard(Optional)1x Power Adapter
1x Wireless Gamepad
1x Green/Red/Blue Plastic Balls
1x Phone Holder+1/4"" Screws
1x Yellow Tape
1x Screws Pack








 Roymall C.o.
Roymall C.o.


 Gratis gave
Gratis gave
 Forsendelsespolitik
Forsendelsespolitik Returpolitik
Returpolitik




























 Coupon Code
Coupon Code Direct purchase from the factory
Direct purchase from the factory 













